アライメントエンジン使用されている技術について(2)
アライメントエンジンに使われている技術について紹介したいと思います。
第二弾として、テンプレート領域の演算について説明します。
テンプレート領域は、単一領域ですが、、Aの領域に対してBの領域を合併、共通、除外という操作が可能でその操作により複雑な領域を作成することが可能になっています。ではここで、合併、共通、除外について説明します。
合併とは、次のように定義しています。
A∪B = {x|x∈A∨x∈B}
2つの領域を合わせて一緒にすることであり、2つの領域の論理和”or”を計算することを意味します。
次に、共通とは次のように定義しています。
A∩B={x|x∈A∧x∈B}
2つの領域の共通部分を見つけることであり、2つの領域の論理積”and”を計算することを意味します。
最後に除外とは次のように定義しています。
A\B={x|x∈A∧x[not∈]B}
2つの領域のうち一方の領域について、それに帰属する元のうち、同時に他方にも含まれる元を取り除いて領域を作成することであり、この領域は、AとBの補集合の交差領域とも定義できます。
このようにして作成した領域を画像に適応し解析範囲を絞り込み、テンプレート領域としています。
今回はここまで。次回に続く。。。
アライメントエンジン使用されている技術について(1)
アライメントエンジンに使われている技術について紹介したいと思います。
まず第一弾として位置決めする際の画像の位置合わせに使用しているテンプレートマッチングについて説明します。
テンプレートマッチングは、画像の中から指定した画像(テンプレート)と似ているところを探します。その時にどれだけ似ているかの評価値を持って決めます。
テンプレートの輝度値をT(i,j)、画像の輝度値をI(i.j)とします。座標の(i,j)はテンプレートの幅をm画素、高さをn画素とした時、左上を(0,0)、右下を(m-1,n-1)とします。
テンプレートをラスタスキャンし、同じ位置の画像の輝度値の差の2乗の合計(1) or 輝度値の差の絶対値の合計(2)を用います。この値が小さいほど似ている位置として判別し、検出します。
(1)の方法をSSDと言い、R=ΣΣ((I(i,j)-(T(i,j))^2で計算します。
(2)の方法をSADと言い、R=ΣΣ|i(i,j)-T(i,j)|^2で計算します。
実際の計算はHalconという画像処理ソフトのオペレータを使うのでブラックボックスになっておりますがこのような手法で行われています。
この方法により、評価値の小さい所(=一致度の高い所)を見つけ出し位置合わせします。
今回はここまで。次回に続く。。。
アライメントエンジン使用されている技術について(3)
アライメントエンジンに使われている技術について紹介したいと思います。
第三弾として、カメラから入力について説明します。
HalconのAPIによりカメラ入力して画像を取得するのですが、カメラには色々なタイプ(GigE,USB,…)があります。カメラ自体の設定については、別の機会に説明するとし、カメラ独自設定をどうするかが問題となります。
例えばゲイン、露光等がありますが、内部ではHalconにあるデバイス設定オペレータで設定をし、画面上からは、エクセルのような表形式でどのような機能でも名称とパラメータとパラメータの型を設定でき、項目数も自在にするようになっております。
では、ここでお客様の使用するカメラ用設定ファイル(XML)を紹介します。ベースは弊社で記述しますが、お客様はこのXMLを直接編集する必要はなく、画面から設定できます。
<SectionItem ID=”set_framegrabber_param” Comment=”カメラ独自パラメータ”>
<KeyItem ID=”Gain” Comment=”ゲイン値” Mode=”Write” Type=”Int” MinInclusive=”0″ MaxInclusive=”63″>5</KeyItem>
<KeyItem ID=”Exposure” Comment=”露光値” Mode=”Write” Type=”Int” MinInclusive=”0″ MaxInclusive=”999985″>125055</KeyItem>
</SectionItem>
上記KeyItemの属性ID値がパラメータ正式名であり、この名称を使ってHalconで設定が可能になります。項目は、カメラにより必要なものを弊社技術者が選択し追加する形となります。
今回はここまで。次回は、カメラのタイプ設定について説明したいと思います。
アライメントエンジンのマッチング機能
こんにちは。画像処理担当の鈴木です。
今回はアライメントエンジンの画像マッチング機能について紹介します。
アライメントエンジンは、画像処理ライブラリHALCONの形状マッチング機能を利用して画像マッチングを行います。形状マッチングとは、事前に登録した元となる画像の形状を対象画像から検索して、画像内の位置や姿勢を検出する機能のことを言います。
1.テンプレート画像の登録
アライメントエンジンでは元となる画像形状の情報をテンプレートと呼びます。
カメラ画像を取得し、画像内の任意の形状をマウス指定によりテンプレート登録することができます。また、登録時には、以下のパラメータを指定することができます。
・画像ピラミッドレベル
高速検索するための画像ピラミッドレベル(後述)
・コントラスト
登録する形状(エッジ)情報を抽出する際のコントラストしきい値
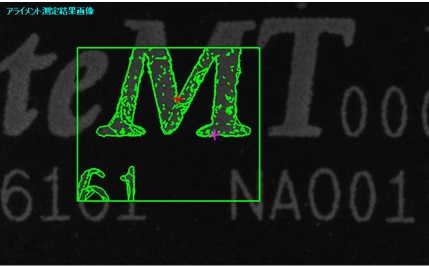
登録する形状(エッジ)は画像に重ねて表示されますので、コントラストパラメータを目で見て確認することができます。
テンプレートエッジ表示
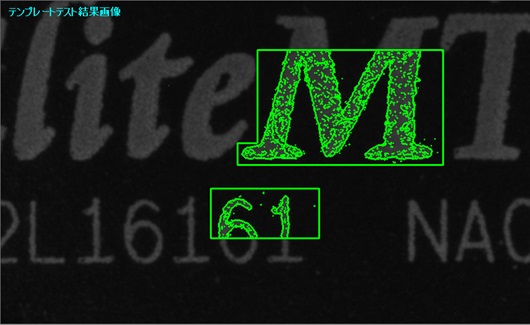
2.形状マッチング
アライメントエンジンでは、カメラ画像に対して形状マッチングをテストし、画面で結果を確認するすることができます。
マッチング結果
また、形状マッチングでは以下のパラメータを指定することができます。
・AngleStart
モデルの回転開始角度。
・AngleExtent
回転角度範囲
・ScaleMin
モデルの最小スケール
・ScaleMax
モデルの最大スケール
・MinScore
検出するモデルの最少スコア
・MaxScore
検出するモデルの最大スコア
・SubPixel
サブピクセルの精度
・NumLevels
マッチングに使用するピラミッドレベル数。
・Greediness
検索の入念さ(0:正確だが、検索速度が遅い。1:検索速度は速いが、検索に失敗する可能性もある)
形状マッチング結果として、以下の情報を得ることができます。
・Row
検出したモデルの位置(Row座標)
・Column
検出したモデルの位置(Column座標)
・Angle
検出したモデルの回転角度
・Scale
検出したモデルのスケール
・Score
検出したモデルのスコア(0.0~1.0)
1.0のとき、形状合致率最大を意味します。
このように、アライメントエンジンの画像マッチング機能では、検索モデル(テンプレート)の位置や、大きさ、回転角も検出することが可能です。
また、Score値により形状の厳密さの判断や、ロバスト性のあるマッチング調整を行うことも可能です。(ただし、Score値を小さくすると誤認識の危険性も高まるため要注意!)
★画像ピラミッドモデル
アライメントエンジンの形状マッチングでは、高速検索を可能にするため画像ピラミッドモデルという手法を採用しています。これは、モデルとなる形状データと検索対象画像を共に縮小して荒検索を行い、見つかったエリアに対応する元倍率画像エリアで再検索する手法の拡張で、1レベルにつき1/2縮小の画像を対象とします。
例えば、ピラミッドレベル4では、
1/2 * 1/2 * 1/2 * 1/2 = 1/16
で1/16縮小画像で検索した後、1/8, 1/4, 1/2, 原寸と検索対象領域を引き継いでマッチングを行います。
アライメントエンジンでは、この手法により超高速な形状マッチングを実現しています。
アライメントエンジン紹介資料がDL可能になりました!
画像マッチングによる位置決めシステム『アライメントエンジン』ご紹介資料がダウンロード可能になりました!
是非ダウンロードページより資料ダウンロードのお申込みをお願い致します。
近況報告
こんにちは。画像処理の鈴木です。
昨年の国際画像機器展2014では、弊社ブースにも沢山のお客様にご来場いただき、誠にありがとうございました。
画像処理に関する色々な課題をお聞かせいただき、大変勉強になりました。
さて、現在私たちは、以下のようなテーマに取り組んでいます。
・形状パターンマッチングによる、交通関連の障害物検出
・ステレオカメラ、レーザーを使った3次元計測による、交通関連の障害物検出
・顔画像解析による眠気度検出
・トンネル構造物・ひび割れ計測
・検査装置でのアライメントエンジンによる位置決め
これらの他にも、インフラ系、製造業系などで様々なお問い合わせをいただいております。
お客様のご要望にお応えできるよう、今年もしっかりがんばっていきますので、
何卒よろしくお願いいたします。
アライメントエンジン動画のご紹介
展示会のブースで再生していたアライメントエンジンの動画をご紹介します。
・テンプレート登録
・アライメント実行
国際画像機器展2014 出展
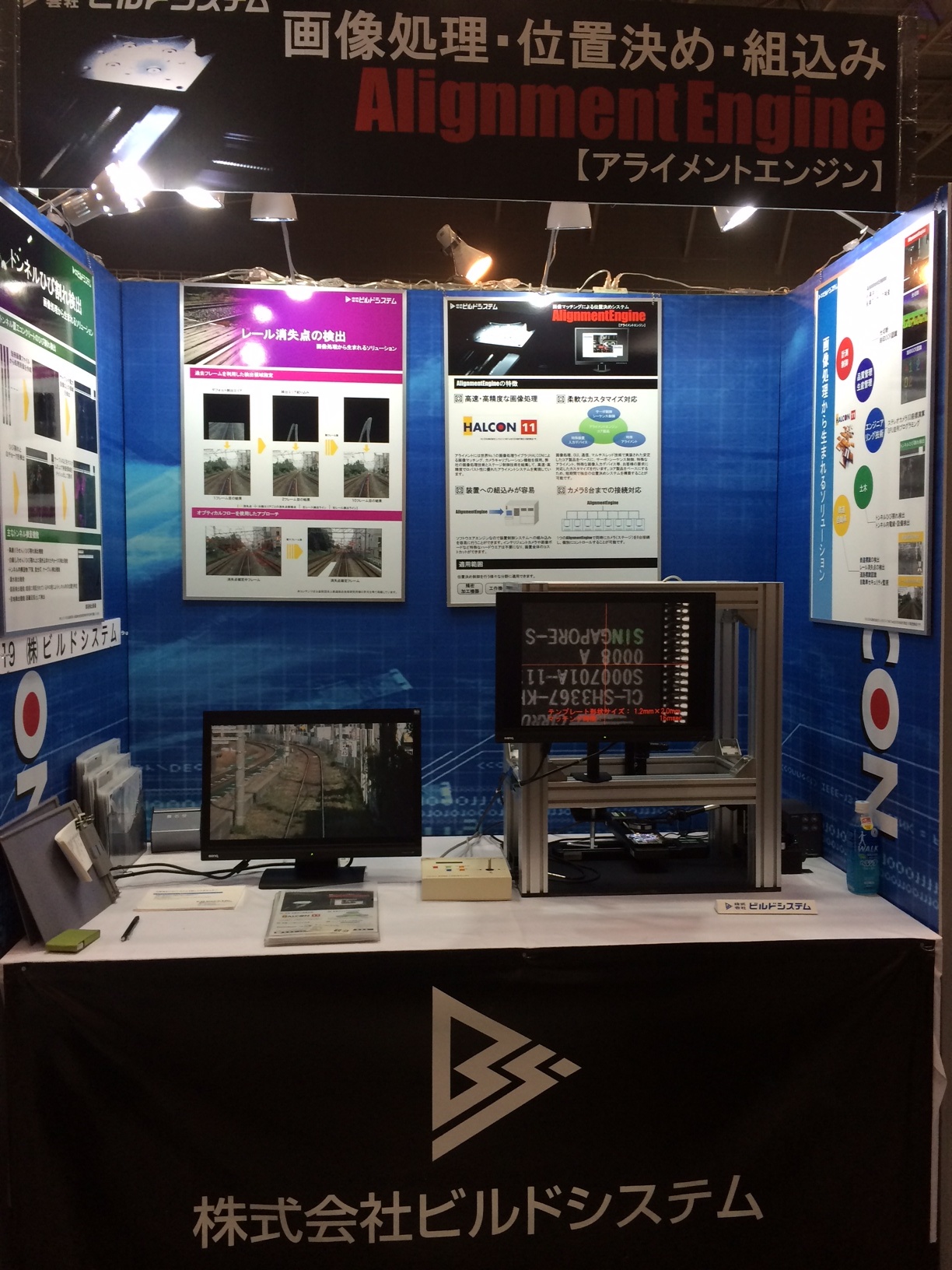
2014画像センシング展 出展風景
こんにちは、画像処理担当マネージャーの鈴木です。
2014年12月3日(水)~5日(金)にパシフィコ横浜で開催される「国際画像機器展2014」に出展します。
今回もLINX社ブースへの共同出展となります。
今年で同展示会は5回目の出展となり、これまで沢山のお客様に紹介させていただきました。
また、様々な画像処理についての課題・ご要望をお聞かせいただき、微力ながらお手伝いをさせていただいております。
今回は、画像マッチングによる位置決めソフトウエア製品「アライメントエンジン」のデモンストレーションやレール検出、信号認識の画像処理事例をビデオなどでご紹介いたします。
最新画像処理技術の情報収集やお客様の課題について、会場でお話ができればと思います。
ビルドシステムの営業・画像処理技術スタッフが精いっぱいの笑顔でお迎えしますので、是非ご来場ください。